In this project, the STARLab has investigated methods for introducing advanced, nonlinear and optimal control to improve the performance of spacecraft, but more importantly, reduce the dependence on exhaustive simulations prior to launch. The significance of this work is that by using control systems that are more reactive and responsive to unplanned failures and unmodeled dynamics, designers can have more confidence in their designs without having to verify all possible fault or stimulus cases prior to the mission start. These savings enable companies to reduce the development cost and schedule, making products more responsive and competitive in the space systems engineering landscape
This project has included three sub-projects:
Subproject A – Optimal Reaction Wheel Trajectory Planning
Spacecraft designers commonly choose reaction wheels as the primary attitude actuators for precision-pointing spacecraft. In these such spacecraft, torques are provided by the acceleration/deacceleration of the wheels. Further, the pointing performance of such a spacecraft degrades due to the presence of disturbance torques which can cause long settling times and large overshoots that limit the precision, stability and agility of the spacecraft. Disturbances that are dependent on wheel speeds such as stiction and resonance can be minimized by setting reaction wheel speeds to be in an operational interval. Reaction wheels exhibit torque disturbances when changing wheel speed directions at \zero-crossings” (due to static friction in the bearings), and when the wheel speed excites the natural frequency of the wheel structures. This research developed an optimal torque mapping method for spacecraft using redundant reaction wheels that minimized the wheel speed zero-crossings and resonance-crossings. The study used Particle Swarm Optimization to solve the optimization problem, that leverages the null space created by redundant reaction wheel control axes. Results have shown that this optimal control technique can eliminate zero-crossings for most moderately-sized slews. Future research is focused on choosing the optimal configuration of redundant reaction wheels for a particular mission profile.
Subproject B – Underactuated Attitude Control Systems
A spacecraft can be controlled by various actuators, including thrusters, reaction wheels, momentum wheels, magnetic torque rods, or any combination of above. The simplest form of attitude control is magnetic since it requires no moving parts. However, since magnetic control can only occur along a plane perpendicular to the local magnetic field vector, magnetic-only control has some severe limitations. If a magnetic moment by spacecraft can be represented with and the local magnetic field with , the produced torque , is . Note that owing to the cross product, a spacecraft is only able to generate torques perpendicular to the local magnetic field when using magnetorquers alone. This poses an interesting challenge, since even three orthogonal magnetorquers result in an underactuated system.
However, using model predictive methods that make use of known attitude perturbations, it may be possible to achieve sufficient control authority for specific missions. By anticipating the disturbances throughout periods of uncontrollability and planning, model predictive control may be a useful tool for underactuated spacecraft attitude control situations. Previous research has already demonstrated that model predictive control can be used to estimate the upcoming expected performance of the system. The perturbation torques can be modelled as constant or time-variance state estimators. This research is investigating the attitude control techniques of a nonlinear and underactuated spacecraft in its nominal orbit. The spacecraft uses three torque rods as active magnetic actuators. This study examines various ways to control and estimate the spacecraft’s attitude by making efficient use of existing attitude perturbations. A spin-stabilized attitude control system has been developed that leverages natural rigid-body stability, achieving pointing accuracy on the order of 10 degrees. Future work over the next two years will model the expected gravity gradient and drag torques in an attempt to use them for additional pointing accuracy.
Subproject C – Fractional Order Control Systems
Spacecraft and drones exhibit may nonlinear dynamic behaviours, including fuel slosh, nonlinear drag and the dynamics of a swinging pendulum. These dynamic systems are difficult to control due to the highly nonlinear behaviour and often lead to problems with linear controllers. Conventional controllers utilize integer order derivatives and integrals to control the system’s response. While these have been applied for a long time on, there is a need to improve the controller’s performance with the ever-growing drone industry. Fractional calculus can be applied to control theory to provide superior performance over integer order controllers. Fractional calculus is a branch of calculus that applies non-integer order derivatives and integers in both real and complex number powers. Current development on fractional derivative and integral models allows for the creation of new more energy efficient and faster controllers. This research project has been investigating how fractional order controllers could assist with the problem of an interplanetary drone carrying a mass on the end of a long tether that is swaying. Simulations and experiments are being conducted that will demonstrate better and more predictable performance when compared with standard nonlinear controllers.
Making the most out of the existing sensors on-board a spacecraft is an excellent way to help reduce the cost associated with mission development. By using existing sensors together in new ways, it is possible to extract more performance out of these sensors to achieve more with less. These sub-projects explore this concept.
Subproject A – Orbital Navigation using Resident Space Objects
A significant cost-driver for satellite missions is the cadre of equipment required for Guidance, Navigation and Control (GNC). As such, missions could cost less if satellite designers could extract more information out of existing sensors, potentially leading to a reduction in the amount of required GNC equipment. As the population of “space junk” or Resident Space Objects (RSOs) has grown, so has the number of space and ground-based detectors for tracking them. This has resulted in detailed databases of RSOs that could be used for guidance. This research project presented a formal feasibility study on how RSO data could be used for spacecraft attitude and orbit determination by leveraging parallax measurements of visible RSOs using existing star trackers. By employing this method, star trackers could provide both orbit and attitude information, potentially eliminating or reducing the reliance on GPS receivers for orbit determination. This research considers how Kalman filters could be used to fuse RSO observations with existing star measurements and also incorporates numerical sensitivity, practical sensor resolution and RSO detectability (through brightness investigations). Currently, estimators have been developed based on an Extended Kalman Filter and on an Unscented Kalman Filter that demonstrate performance on the order of a few kilometers error (driven largely by tracking errors in the RSOs). Future work is focused on adding ranging capability into the estimator, which could be possible for cooperative objects.
Subproject B – On-Orbit Parameter Identification
Each satellite mission requires several different parameters to be determined prior to launch, as inputs to the satellite’s guidance, navigation and control system. These parameters include the inertia matrix and the precise orientation and scale factors of every sensor and actuator. Measuring these parameters is possible on the ground, but extremely expensive. Estimating the inertia tensor requires mounting the spacecraft in three orthogonal directions and spinning it to measure the reaction torques. Sensor and actuator alignment activities require sensitive laser alignment using optical cubes. Scale factor estimation usually requires highly force / moment sensors and/or other stimuli for exciting the sensors. All of these activities take many weeks and thousands (or even millions) of dollars to complete.
By estimating these parameters on-orbit, it has the potential to save this cost and schedule expense, and estimate the parameters with greater accuracy than what would have been possible on the ground. This research is developing algorithms that estimate these dynamic parameters following a series of test slews by a spacecraft recently launched into orbit. The algorithms make use of Particle Swarm Optimization to fit the observed motion to the predicted motion. Further, the algorithms make use of redundant sensors and actuators (in the null space) to observe previously unobservable parameters, such as the inertia and torque scale factors simultaneously. Progress so far has demonstrated combined actuator, sensor and inertia estimation to accuracies better than 1%. Future work is focused on determining the optimal slew trajectories for estimating these parameters in a minimum amount of time.
Modern composite manufacturing technology enables space systems designs that leverage the layered architecture of various different materials. By choosing appropriate materials, functions such as radiation shielding, thermal control or communications antennas can be built into the panel, potentially resulting in commercializable products for the Canadian space sector.
Subproject A – Embedded Spacecraft Antennas
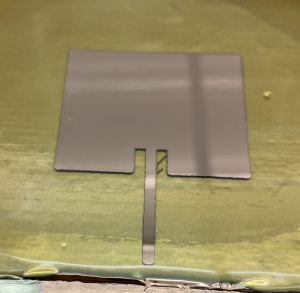 The increasing commercialization of space missions call for versatile subsystems that make efficient use of limited spacecraft volumes. Smart panel technology that provides both mechanical and electrical functionality is a beneficial solution to spacecraft miniaturization. Combining different subsystems that are usually developed independently of each other is an innovative approach to space system design. Embedding antennas within satellite structural components reduces the overhead required for integrating numerous systems and maximizes space for the payload and other critical instruments. Microstrip patch antennas provide a low profile, light weight, small-dimension and easily manufactured solution to small satellite communication. The phased array functionality of the antenna enables dynamic beamforming for maximum versatility. In this research project, we evaluated the feasibility of an embedded phased array microstrip patch antenna with a composite structural panel comprised of carbon fiber reinforced polymers (CFRP), high density polyethylene (HDPE), and aluminium, with SU-8 as the antenna substrate. The embedded antenna panels are designed to be adaptable for any function and size required by the end user. We presented the design of the smart panel antenna modelled using electromagnetic simulation software. The CFRP and HDPE materials were modelled with approximations of their electrical properties derived from experimental S-parameter and impedance measurements. The simulated antenna’s radiation performance such as half power beam width, efficiency and gain were evaluated. The performance characteristics of the simulated antenna design were used to evaluate its application and feasibility in systems integration, and different uses in case studies including radar mapping spacecraft, satellite constellations, and CubeSats. This project has demonstrated sufficient antenna performance to support command and basic telemetry for spacecraft. Future work will investigate the feasibility of phased arrays using this technology.
The increasing commercialization of space missions call for versatile subsystems that make efficient use of limited spacecraft volumes. Smart panel technology that provides both mechanical and electrical functionality is a beneficial solution to spacecraft miniaturization. Combining different subsystems that are usually developed independently of each other is an innovative approach to space system design. Embedding antennas within satellite structural components reduces the overhead required for integrating numerous systems and maximizes space for the payload and other critical instruments. Microstrip patch antennas provide a low profile, light weight, small-dimension and easily manufactured solution to small satellite communication. The phased array functionality of the antenna enables dynamic beamforming for maximum versatility. In this research project, we evaluated the feasibility of an embedded phased array microstrip patch antenna with a composite structural panel comprised of carbon fiber reinforced polymers (CFRP), high density polyethylene (HDPE), and aluminium, with SU-8 as the antenna substrate. The embedded antenna panels are designed to be adaptable for any function and size required by the end user. We presented the design of the smart panel antenna modelled using electromagnetic simulation software. The CFRP and HDPE materials were modelled with approximations of their electrical properties derived from experimental S-parameter and impedance measurements. The simulated antenna’s radiation performance such as half power beam width, efficiency and gain were evaluated. The performance characteristics of the simulated antenna design were used to evaluate its application and feasibility in systems integration, and different uses in case studies including radar mapping spacecraft, satellite constellations, and CubeSats. This project has demonstrated sufficient antenna performance to support command and basic telemetry for spacecraft. Future work will investigate the feasibility of phased arrays using this technology.
Subproject B – Thermal Control Tiles
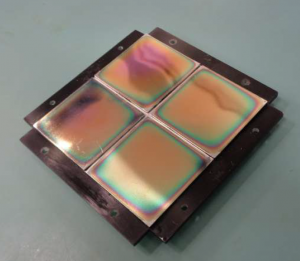 Small satellites often face thermal control challenges due to their restricted power and low thermal capacitance (leading to wide temperature swings). Smart Radiator Devices (SRDs) provide a spacecraft with improved passive thermal control over traditional radiator materials as their thermal properties change with temperature. SRDs reduce the power consumed by a satellite’s thermal control system as they facilitate rapid radiative heat transfer when the spacecraft is hot while suppressing radiation when cold, thereby reducing the heater power required to maintain acceptable temperatures. The SRD emissivity variations also reduce the spacecraft temperature variability due to their tighter thermal control. In this research, we studied the benefits of an SRD (designed by MPB Communications) that transitions emissivity from low to high at approximately 25⁰C, increasing its radiative heat transfer and allowing the host spacecraft to cool more quickly. We performed thermal vacuum testing on an SRD mounted to a representative model of a CubeSat panel. The research demonstrated that the SRDs are a viable tool for spacecraft thermal control. The SRDs tested as part of this research are currently operating on-orbit on a Kepler Communications spacecraft.
Small satellites often face thermal control challenges due to their restricted power and low thermal capacitance (leading to wide temperature swings). Smart Radiator Devices (SRDs) provide a spacecraft with improved passive thermal control over traditional radiator materials as their thermal properties change with temperature. SRDs reduce the power consumed by a satellite’s thermal control system as they facilitate rapid radiative heat transfer when the spacecraft is hot while suppressing radiation when cold, thereby reducing the heater power required to maintain acceptable temperatures. The SRD emissivity variations also reduce the spacecraft temperature variability due to their tighter thermal control. In this research, we studied the benefits of an SRD (designed by MPB Communications) that transitions emissivity from low to high at approximately 25⁰C, increasing its radiative heat transfer and allowing the host spacecraft to cool more quickly. We performed thermal vacuum testing on an SRD mounted to a representative model of a CubeSat panel. The research demonstrated that the SRDs are a viable tool for spacecraft thermal control. The SRDs tested as part of this research are currently operating on-orbit on a Kepler Communications spacecraft.
Many spacecraft guidance, navigation and control advancements do not find their way into commercial use due to fear that they may fail on-orbit. This fear largely stems from the difficultly in demonstrating the performance of the system on real hardware. The multi-vehicle drone testbed being developed in the STARLab is attempting to improve technology adoption in the space industry by providing a 6-axis hardware in the loop testbed for small spacecraft.
Subproject A – Testbed Architecture and Prototyping Environment
Space guidance, navigation and control systems have historically been difficult to verify prior to orbital deployment. Due to the difficulty in replicating suitable dynamics on the ground, engineers rely heavily on simulations of dynamics, sensors, actuators and environmental disturbances. While some hardware-in-the-loop testbeds exist, many do not enable full three-dimensional control with real sensors and actuators. To address this, the University of Manitoba Space Technology and Advanced Research Laboratory (STARLab) has developed a drone-based, three-dimensional testbed for space guidance, navigation and control. The testbed relies upon accurate knowledge of drone dynamics to enable high-quality dynamic replication of space environment using feed-forward control. This poses a challenge since modelling uncertainties can cause feed-forward control to inject large disturbances if not handled correctly.
This research presents an intelligent system identification method that enables accurate feed-forward control using minimal measurements and without requiring wind tunnel tests. This method applies to any drone following post-processing of flight data. The system identification method uses a parallel grey-box and black-box approach to get a high-precision model. For the grey box model, the Particle Swarm Optimization (PSO) algorithm is used to find the parameters of the drone’s dynamics and aerodynamics. An artificial neural network is placed in parallel to compensate for the uncertainties and effects that are not considered in the PSO model. Using this architecture, we are able to generate feed-forward control inputs that provide sufficient abstraction for simulating a virtual dynamic environment such as microgravity or extra-terrestrial drone dynamics in support of future space exploration missions. Currently, this testbed has demonstrated the capability of simulating reduced gravity operations of drones. Future work is planned to extend this to mimic vehicles of different mass as well.
Subproject B – Translational and Rotational Dynamic Emulation
Spacecraft control systems are crucial to a space mission, making them an important focus of pre-launch verification activities. Currently, some of the common testbeds used by researchers are parabolic flight tests, Neutral Buoyancy Facilities (NBFs), and air-bearing based testbeds. Researchers need requirements such as reconfigurability, availability, accessibility and endurance for these testbeds. Each of these testbeds has some downsides which prevent them from meeting all of those requirements. Emulating spacecraft dynamics on an aerial vehicle can meet all of the aforementioned requirements. Thus, this research investigates a dynamic emulation method using an aerial vehicle for a new testbed known as Reconfigurable and Empirical Spacecraft Emulation Testbed (RESET) in a 1-G indoor laboratory. Using this method, we can emulate translational and rotational dynamics of a spacecraft with different dynamics and/or mass properties. First, we introduced a mathematical model of translational and rotational dynamic emulation and study the stability in the presence of sensor delays. Then, numerical simulations in MATLAB/Simulink are presented to demonstrate the feasibility of the dynamic emulation method. Future work is focusing on demonstrating this in hardware on the testbed.
CubeSats provide an excellent opportunity for students and industry to evaluate new space technologies in advance of commercialization. By developing a set of CubeSat avionics and modular structure, we will provide the next generation of graduate students in the STARLab with a platform for quickly building satellites for scientific or technology demonstration purposes. The following sub-projects detail these efforts.
Subproject A – ManitobaSat-1 Mission (Iris)
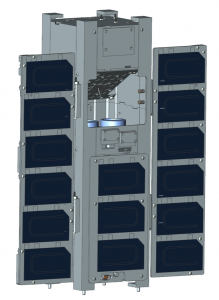 Iris is a 3U CubeSat program that is determined to advance the edges of amateur radio operations by performing things differently from traditional design strategies. This will enhance access to space and amateur radio technology through novel technology development and verification.
Iris is a 3U CubeSat program that is determined to advance the edges of amateur radio operations by performing things differently from traditional design strategies. This will enhance access to space and amateur radio technology through novel technology development and verification.
Iris was developed at the University of Manitoba by the Space Technologies and Advanced Research Laboratory (STARLab) in collaboration with the Centre for Terrestrial and Planetary Exploration (C-TAPE) at University of Winnipeg, York University, the Interlake School Division, and Magellan Aerospace, our industrial partner. Iris completed its critical design phase and underwent Assembly, Integration and Test (AIT) at Magellan’s Advanced Satellite Integration Facility (ASIF). Here, the satellite was assembled and tested over a wide range of environments including launch vibration, thermal vacuum and deployment shock. Iris has a planned launch date in June 2023 through launch provider, Nanoracks.
Subproject B – Innovative Project Management for Satellite Missions
The Apollo moon missions of the 1960s pioneered the classic phased approach to space mission management. While successful at the time, this rigid and inflexible management philosophy has become synonymous with cost and schedule overruns of most high-profile space missions. The software industry has recently adopted modern, more flexible project management techniques based on “lean-agile” methods that enable team collaboration and communication through distributed task and schedule management, online document sharing and rolling-wave planning. However, due to the inherent schedule complexities of hardware development and the firm constraints of design review and launch timelines, flexible project management frameworks have not been widely adopted for space mission management. This subproject introduced a modified version of the traditional agile management philosophy, adapted to the unique needs of the space industry. The Iris project was managed using the new modified-agile approach, while collecting project hours and task durations. Comparisons were made between this new style of space project management and a recently-completed satellite development project using traditional space project management techniques. Results showed that the new management approach, reduced strain on the project team, improved overall productivity, and maintained a more level task loading when compared to the traditional management approach. This research also illustrated how the new management approach enabled project resilience to change by analyzing its response to the labor disruptions caused by the COVID-19 pandemic.
We developed the Sensible Optimization for Aerial Robots (SOFAR) tool for automatically minimizing the cost of drone systems using a database of commercial components and linking it directly to CAD software. For this system, a user enters a high-level set of requirements and the software selected a cost-optimal design drawn upon a database of COTS parts. Then, it automatically creates an editable CAD model in Siemens NX.
Download the software HERE.